
Savant Systems and Apple have patented a wireless solution for remote-controlling a vehicle – specifically marine vessels such as yachts.
Apple founder Steve Jobs and Savant founder Robert Madonna – amongst others – are named in the patent, the first iteration of which was filed in March 2013. A subsequent version was filed in 2014 and the utility patent was granted this week for a ‘Remote motion control using a wireless mobile device’.
The patent describes little more than a generic smart phone or tablet communicating over a wireless network to a server that issues commands to control the mechanics of a boat:
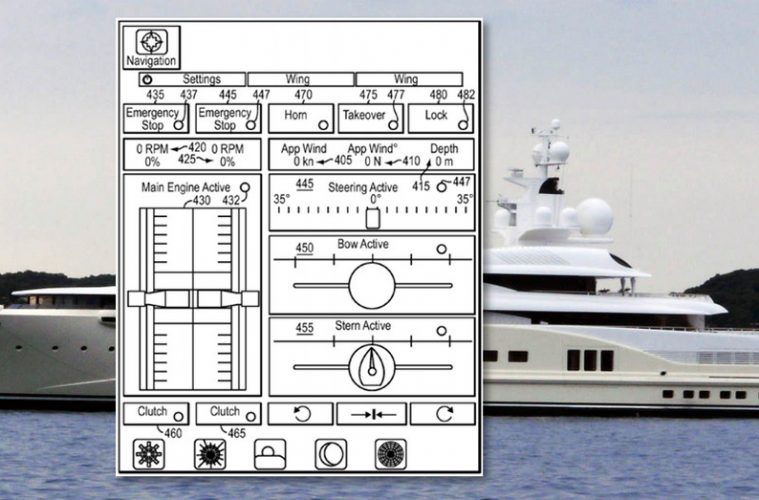
In one embodiment, a general-purpose wireless mobile device having a touch-sensitive screen and executing a remote control application is used to remotely control a vehicle (e.g., a marine vessel). The general-purpose wireless mobile device communicates via a wireless network with an interface (e.g., a server) that is coupled to an electronic control system of the vehicle (e.g., the vessel). In operation, environmental information and/or system status information is collected through the electronic control system, propagated to the interface (e.g., server), and then sent over the wireless network to the wireless mobile device. Similarly, control input is sent over the wireless network to the interface (e.g., server), which passes the information to the electronic control system, which in turn issues appropriate control signals to the vehicle subsystems (e.g., marine subsystems) to control the motion of the vehicle (e.g., the vessel).

The invention includes a component for monitoring the health of the network to ensure packets get through to the vessel-control system, with feedback returning to the mobile device.
A system comprising: an interface coupled to an electronic control system of a vehicle; and a general-purpose wireless mobile device having a touch-sensitive screen in communication with the interface via a wireless network, the general-purpose wireless mobile device configured to execute a remote control application that includes: a packet delivery module configured to exchange packets with the interface over the wireless network, a network health monitor configured to use packet data for packets exchanged during a sliding window having at least a predetermined length or a predetermined size to calculate one or more performance metrics, at least one of the one or more performance metrics being an instantaneous jitter metric, a cumulative delay metric, an average jitter metric or a retransmission metric to determine a network health score for the wireless network based on the one or more performance metrics, to compare the network health score to a health threshold, and based on whether the network health score meets the health threshold, to permit or disable remote motion control of the vehicle via the general-purpose wireless mobile device, and a user interface (UI) configured to display environmental information and/or system status information for the vehicle on the touch-sensitive screen of the general-purpose wireless mobile device, and to receive on the touch-sensitive screen control input indicating desired motion control for the vehicle, wherein, when remote motion control via the general-purpose wireless mobile device is permitted, the control input is passed to the interface to cause the electronic control system to issue control signals to subsystems to control motion of the vehicle, and when remote motion control via the general-purpose wireless mobile device is disabled, motion control responsibility is returned to a main control interface of the vehicle.
As described in the patent, crew members on large marine vessels often have to run back and forth or use walkie talkies to message each other from helms to control rooms. Often the information gets lost in translation, and you never quite know if the required action was taken.
Even for vessels that have some kind of remote-control operation over dedicated wireless frequencies, they require dedicated devices for control – devices that crew members tend not to carry around the boat.

During the potentially long stretches of time between their use, dedicated wireless remote controller may be set aside, to be forgotten about or lost. An operator generally has little reason to carry them about on their person, due to their infrequent use. Accordingly, when an opportunity for their use does arise, they are typically not at hand, and an operator may need to search about the vessel to locate the dedicated wireless remote controller, before it can even be used.
There’s all kinds of other problems with the archaic way of operating vessels.
Wouldn’t it be better if the boat’s controls could be operated remotely via an App, with two-way feedback provided from the central controller?
That’s the gist of the patent.
A variety of types of vehicles have some sort of main control interface through which an operator can monitor and control the vehicle. Typically, the main control interface is coupled via a wired connection to lower level systems. For example, in modern marine vessels (e.g., yachts), a main helm station is generally provided through which an operator (e.g., the captain) may monitor and control the vessel. The main helm station typically is coupled via a wired connection to an electronic control system of the vessel, which is in turn coupled to various sensors and marine subsystems onboard the vessel.
Environmental information and system status information may be collected by sensors, under the direction of the electronic control system, and passed back over the wired connection for displayed upon the main helm station. Control input entered by the operator on the main helm station may be passed over the wired connection to the electronic control system, which issues control signals to the marine subsystems to control motion, and potentially other functions, of the vessel.

In a typical arrangement, the main helm station is centrally located, often on the main level of the vessel. While visibility from such a location may be adequate in most situations, in some situations it may be insufficient. For example, if the vessel is maneuvering in port to moor or dock, an operator at the main helm station may not have adequate line of sight to judge the position of the vessel with respect to the edge of the dock or mooring.
Traditionally, a crew member is stationed on the deck of the vessel at a position that provides better visibility, for example, by the rail. The crew member is tasked with verbally relaying information to the operator at the main helm station. For example, as the vessel approaches the dock or mooring, the crew member may relay back relevant distances and suggest course corrections. However, this relay of information is problematic.
The crew member may misspeak, or the operator may mishear a crucial piece of information. Further, the crew member may lack the experience of the operator, and this lack of experience may cause them to misestimate distances or suggest incorrect course corrections. Still further, there is an inherent delay to this sort of relay of information, and this delay may be problematic in some situations.
In attempts to address these issues, some vessels employ stationary secondary helm stations coupled to the electronic control system via wired connections. These stationary secondary helm stations may be located at positions on the deck of the vessel where better visibility is available. An operator may temporarily take control of vessel from one of these stationary secondary helm stations. However, while this approach may be somewhat of an improvement over verbally relaying information back, it still suffers from several shortcomings.
While a given stationary secondary helm station may be located at a better position than the main helm station for performing one type of maneuver, it may be in a poorer location when another type of maneuver is required. Accordingly, to be effective, there typically needs to be several secondary helm stations dispersed about the vessel, to provide coverage for common maneuvers. The need for duplicative secondary helm stations, and the wiring required to support each secondary helm station, adds expense to the vessel. Further, duplicative secondary helm stations consume space that could be better utilized for other purposes.
In further attempts to address these issues, some vessels employ dedicated wireless remote controllers that include physical buttons or switches for controlling the vessel. A dedicated wireless remote controller may include a transmitter configured to transmit upon one or more predefined radio frequency bands. However, while this approach may also be somewhat of an improvement over verbally relaying information, it too suffers from several shortcomings. Dedicated wireless remote controllers may be inconvenient. An operator may desire remote control only few times in a given voyage, for example, when entering or leaving port.

During the potentially long stretches of time between their use, dedicated wireless remote controller may be set aside, to be forgotten about or lost. An operator generally has little reason to carry them about on their person, due to their infrequent use. Accordingly, when an opportunity for their use does arise, they are typically not at hand, and an operator may need to search about the vessel to locate the dedicated wireless remote controller, before it can even be used. Further, many dedicated wireless remote controllers lack sufficient safeguards to ensure that input entered on the dedicated wireless remote controller is being received in a timely and accurate manner by the electronic control system of the vessel.
This may create a potential for catastrophic failure, for example, where an operator believes that control input they have entered will be acted upon, only to find that it is not. Further, dedicated wireless remote controllers typically do not provide sufficient environmental and system status information to permit more advanced types of control.
Accordingly, there is a need for improved techniques for remote motion control of a vehicle (e.g., a marine vessel), that may address some, or all, of these shortcomings.
This article originally appeared on CE Pro.